Robot hand
Please install a check valve in the air-pressure circuit so that the gripper will not release a workpiece even if the air pressure drops down.
When the jaw stroke is detected by the reed switches, mount reed switched on the grooves on the outer periphery of the base unit. Up to 6 reed switches can be mounted. This model does not support stroke check with Proximity switches.
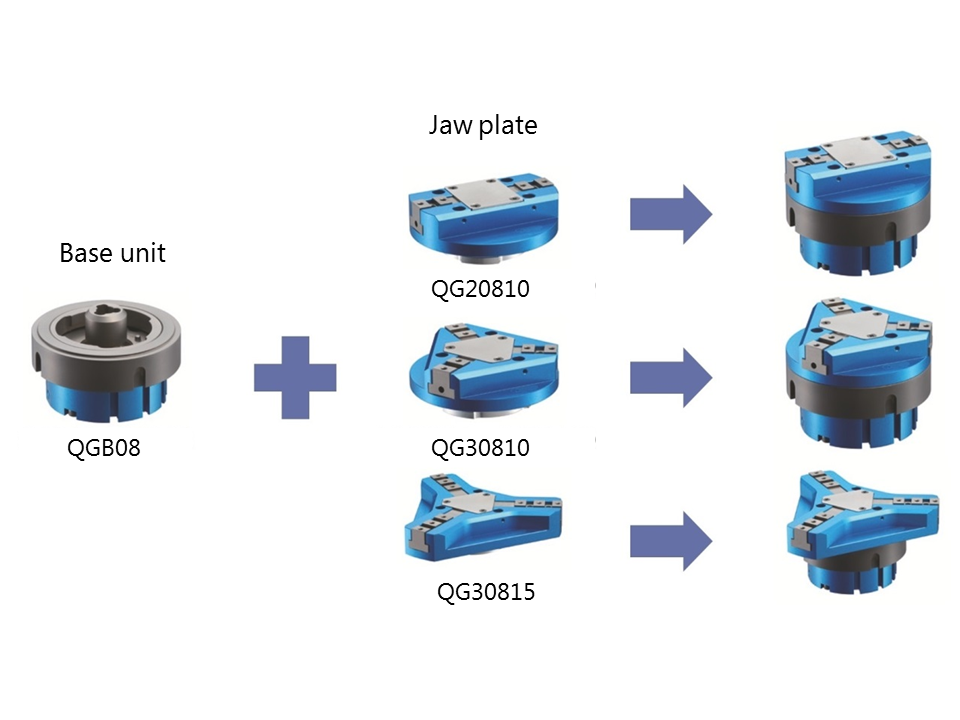
Base Unit QGB series
| Model | Piston Stroke (mm) |
Piston Thrust (Note1) | Mass (kg) |
Air Consumption per reciprocating (cm3) |
Air Pressure (MPa) |
Operating Temperature (℃) |
Lock nut tightening torque (N・m) |
|
|---|---|---|---|---|---|---|---|---|
| Pull (N) |
Push (N) |
|||||||
| QGB06 | 7.5 | 867 | 968 | 0.75 | 24.1 | 0.2 ~ 0.8 | 5 ~ 60 | 12 |
| QGBL06 | 15 | 0.85 | 52.6 | |||||
| QGB08 | 10 | 1353 | 1506 | 1.15 | 50.2 | 20 | ||
| QGB11 | 12.9 | 3010 | 3240 | 2.33 | 134.7 | 28 | ||
(Note1) Value at supply air pressure 0.6 MPa.
(Note2) QGBL06 is the long stroke model.
Jaw Plate QG series
| Model | Matching Base Unit | Jaw Stroke Diameter (mm) |
Gripping Force (Note2) | Repeatability (Reference Value) (mm) |
Mass (kg) |
Air Pressure (MPa) |
Operating Temperature (℃) |
||
|---|---|---|---|---|---|---|---|---|---|
| Measurement (mm) |
OD Gripping (N) |
ID Gripping (N) |
|||||||
| QG30608 | QGB06 | 11.2 | 20 | 750 | 800 | ±0.03 | 0.33 | 0.2 ~ 0.8 | 5 ~ 60 |
| QG20608 | 0.30 | 0.2 ~ 0.6 | |||||||
| QGL30610 | QGBL06 | 24.0 | 0.64 | 0.2 ~ 0.8 | |||||
| QG30810 | QGB08 | 15.6 | 20 | 1010 | 1120 | 0.55 | 0.2 ~ 0.8 | ||
| QG30815 | 0.90 | ||||||||
| QG20810 | 0.40 | 0.2 ~ 0.6 | |||||||
| QG31112 | QGB11 | 20 | 20 | 2360 | 2620 | 1.31 | 0.2 ~ 0.8 | ||
| QG21112 | 2140 | 2700 | 1.20 | ||||||
(Note1) The measurement distance is the distance from the top surface of the master jaw to the gripping centre.
(Note2) Value at supply air pressure 0.6 MPa.
(Note3) QGL30610 is the long stroke model.
* Download the instruction manual for QG (standard stroke model) from here.
* Download the instruction manual for QGL (long stroke model) from here.
When attaching or detaching the face plate, follow the instructions below.
Removal Procedure for the Jaw Plate
Installation Procedure for the Jaw Plate
For more information on the allowable load of each gripper, please see the following link.
Click the model number and the gripping force diagram will be displayed. The gripping force, F is a product of the actual gripping force per jaw, F1 and the number of jaws
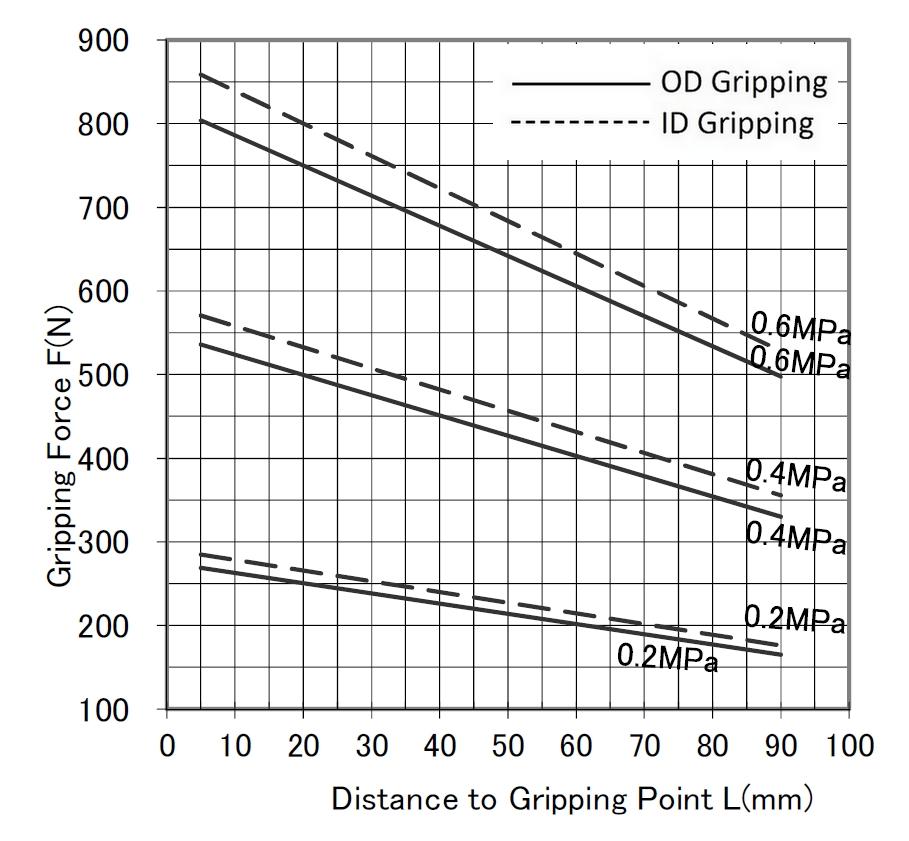
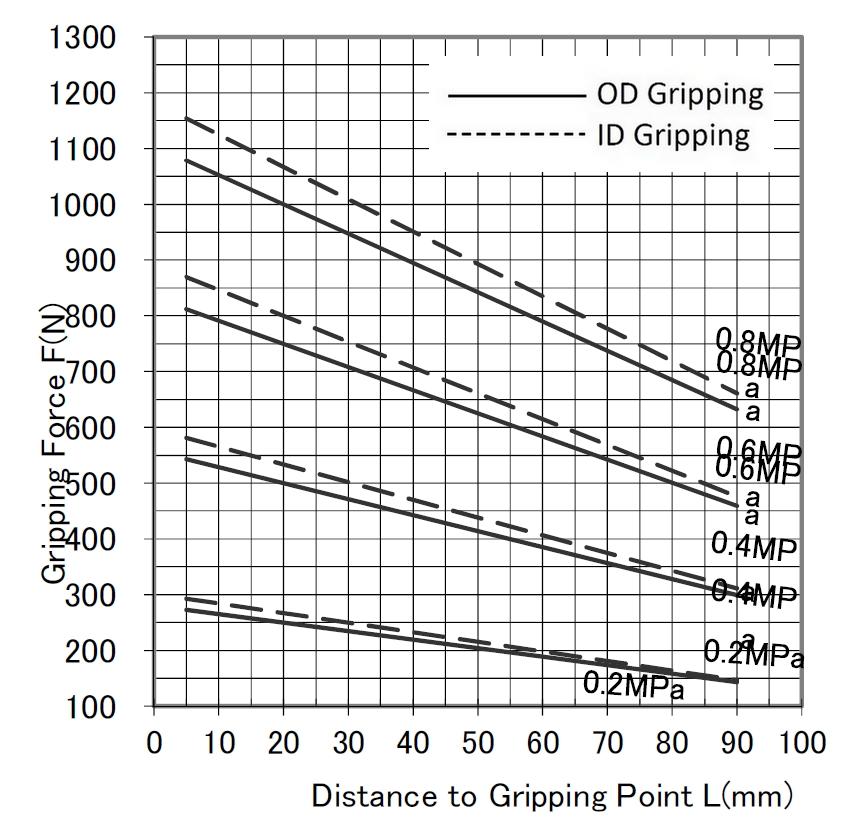
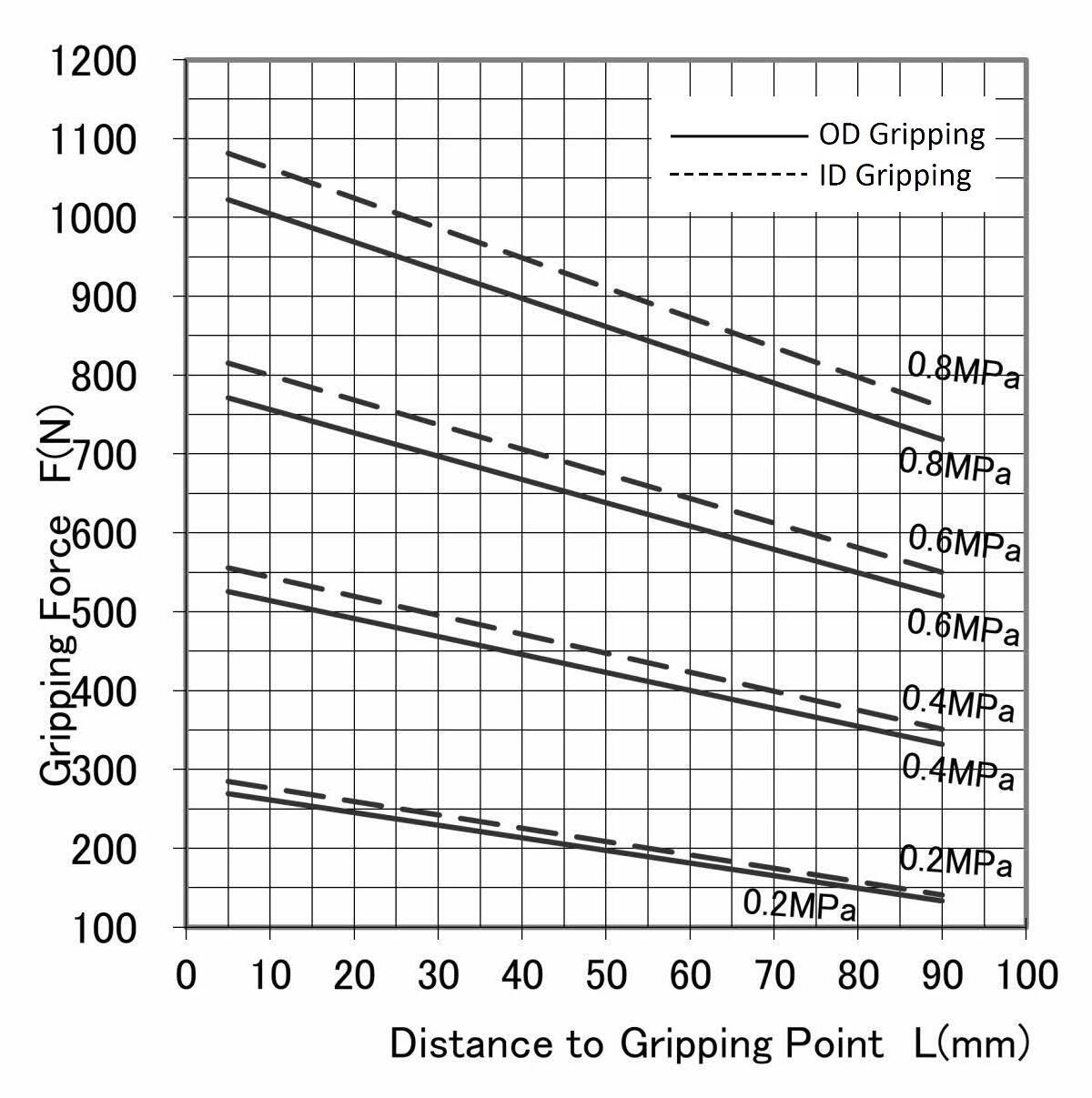
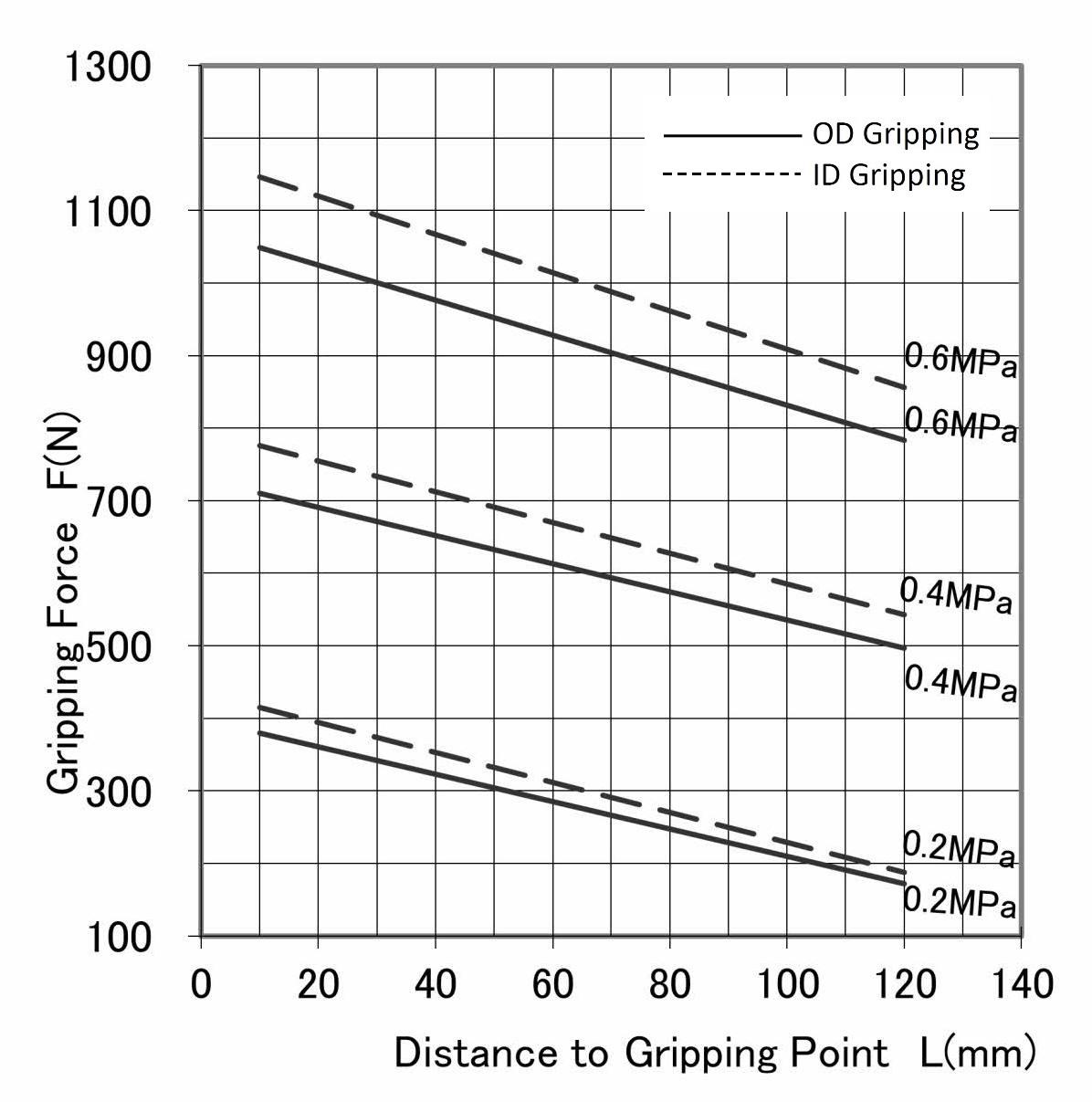
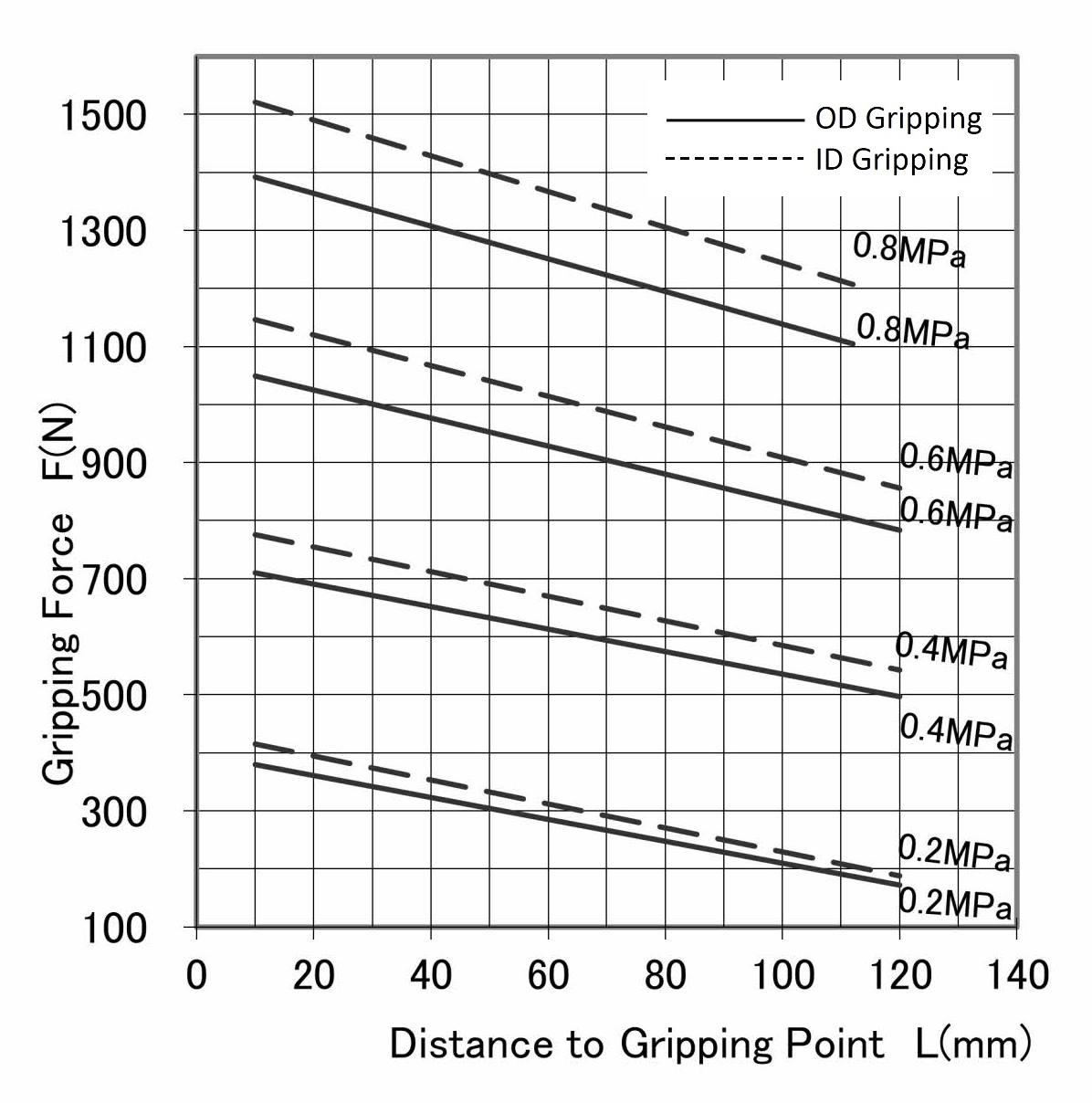
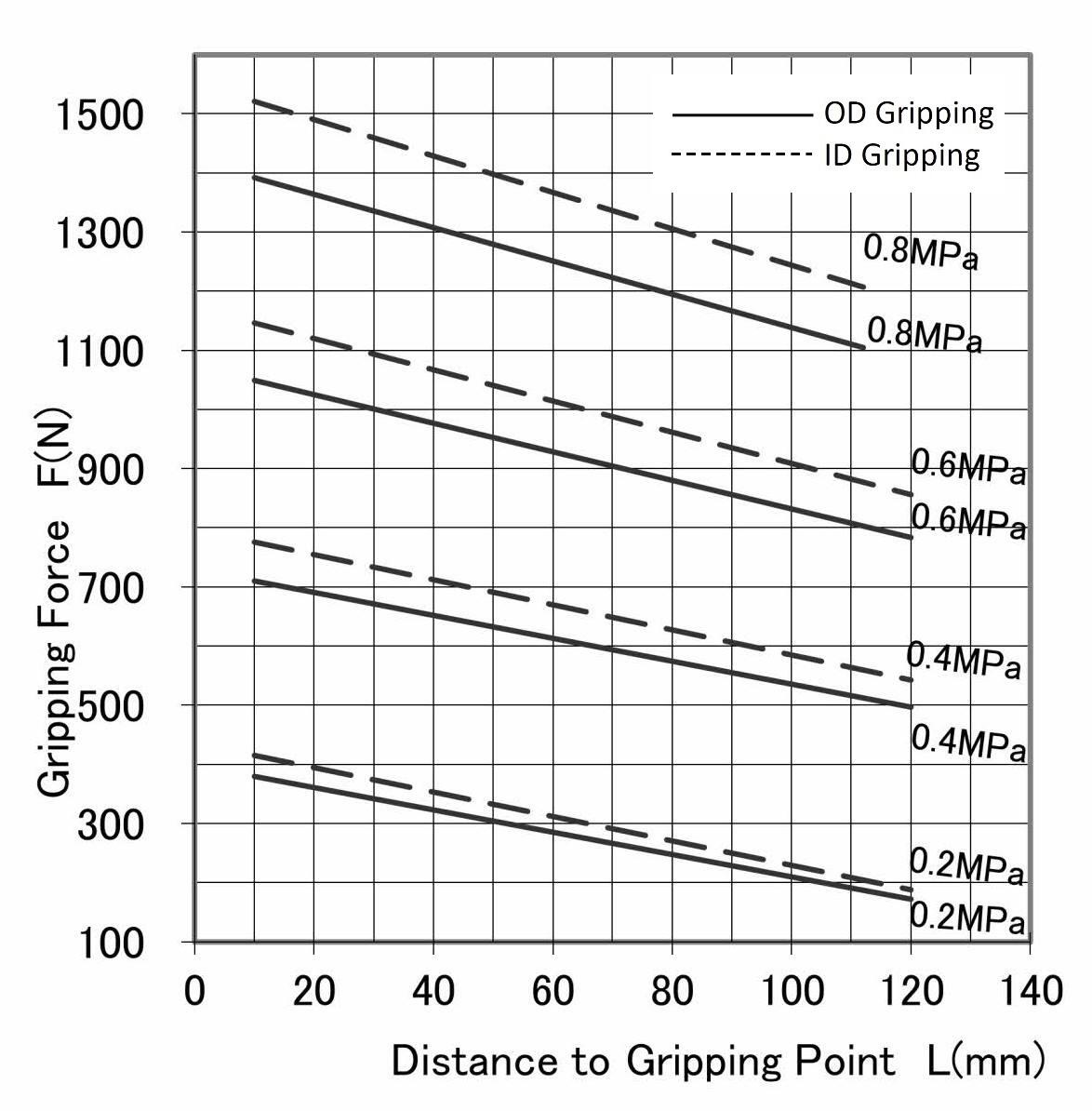
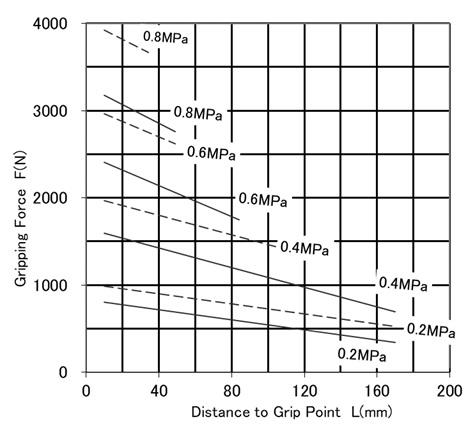
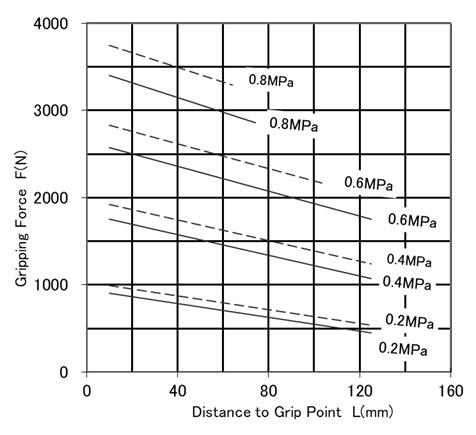
The gripping force will be calculated by the gripper model, air pressure, and other gripping conditions.
Calculate gripping force| Model | Drawing download | |||
|---|---|---|---|---|
| QGB06 | DXF | Parasolid | ||
| STEP | ||||
| QG30608 | DXF | Parasolid | Parasolid(QGB06+QG30608) | |
| STEP | STEP(QGB06+QG30608) | |||
| QG20608 | DXF | Parasolid | Parasolid(QGB06+QG20608) | |
| STEP | STEP(QGB06+QG20608) | |||
| QGBL06 | DXF | Parasolid | ||
| STEP | ||||
| QGL30610 | DXF | Parasolid | Parasolid(QGBL06+QGL30610) | |
| STEP | STEP(QGBL06+QGL30610) | |||
| QGB08 | DXF | Parasolid | ||
| STEP | ||||
| QG30810 | DXF | Parasolid | Parasolid(QGB08+QG30810) | |
| STEP | STEP(QGB08+QG30810) | |||
| QG30815 | DXF | Parasolid | Parasolid(QGB08+QG30815) | |
| STEP | STEP(QGB08+QG30815) | |||
| QG20810 | DXF | Parasolid | Parasolid(QGB08+QG20810) | |
| STEP | STEP(QGB08+QG20810) | |||
| QGB11 | DXF | Parasolid | ||
| STEP | ||||
| QG31112 | DXF | Parasolid | Parasolid(QGB11+QG31112) | |
| STEP | STEP(QGB11+QG31112) | |||
| QG21112 | DXF | Parasolid | Parasolid(QGB11+QG21112) | |
| STEP | STEP(QGB11+QG21112) | |||
Note 1) The 3D data for the base units (QGB, QGBL) represents the piston positions at the fully extended end (UC) and the fully retracted end (OC).
Note 2) The 3D data for the jaw plates (QG, QGL) represents the jaw positions at the fully open end (UC), the fully closed end (OC), and the centre of stroke (HCL).



Wide variety of world’s standard power chuck

High gripping force & stability to suit various requirements

Standard Manual Chucks suit to a high-mixture of work pieces and low-volume production.


Necessary item for Quality control and Safety

High performance Rotary Cylinder is integral to for the operation of a power chuck and extracts the maximum capability of the chuck.
Compact & high accuracy Combination with chuck is available.

Tail stocks, tail spindles, rotary joints, rotary chucks, Dedicated controller and others

Toggle joint mechanism Long jaw stroke


Stationary power chuck with built-in cylinder

Kitagawa's original grippers with high-quality and high-durability
Strongly support factory automation and unmanned operation

Various catalogues can be downloaded.

Various flyers can be downloaded

Information on discontinued products is posted.