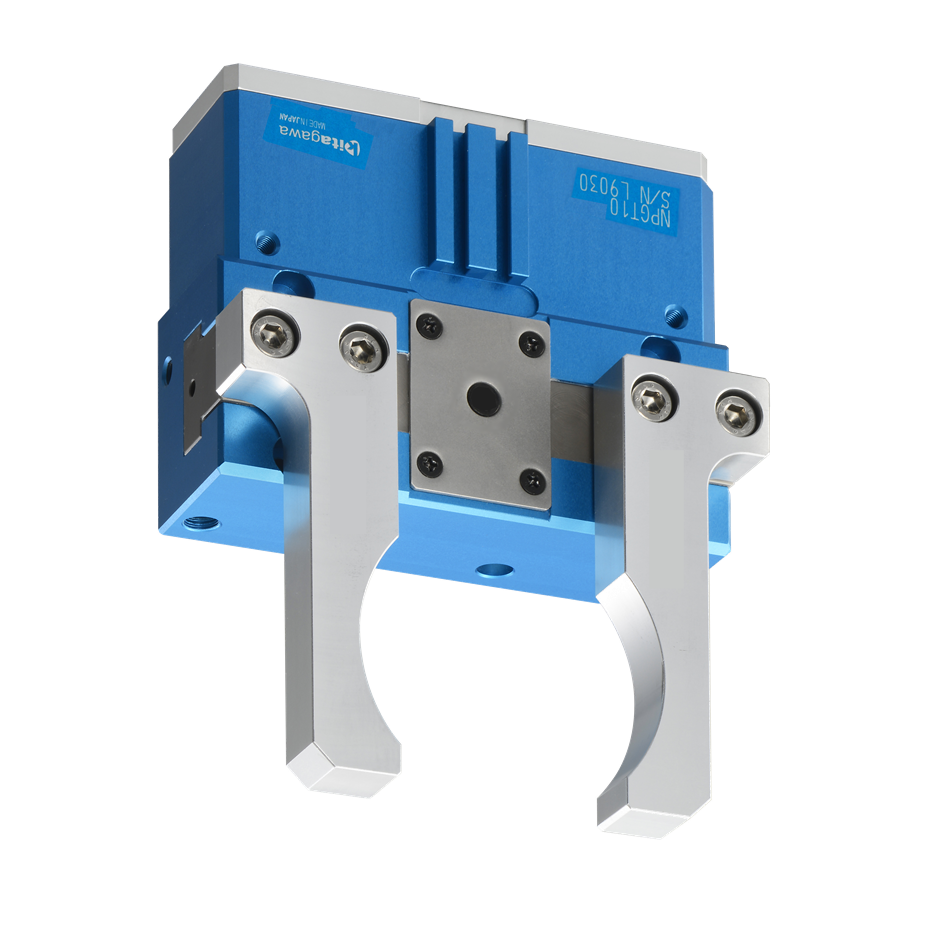
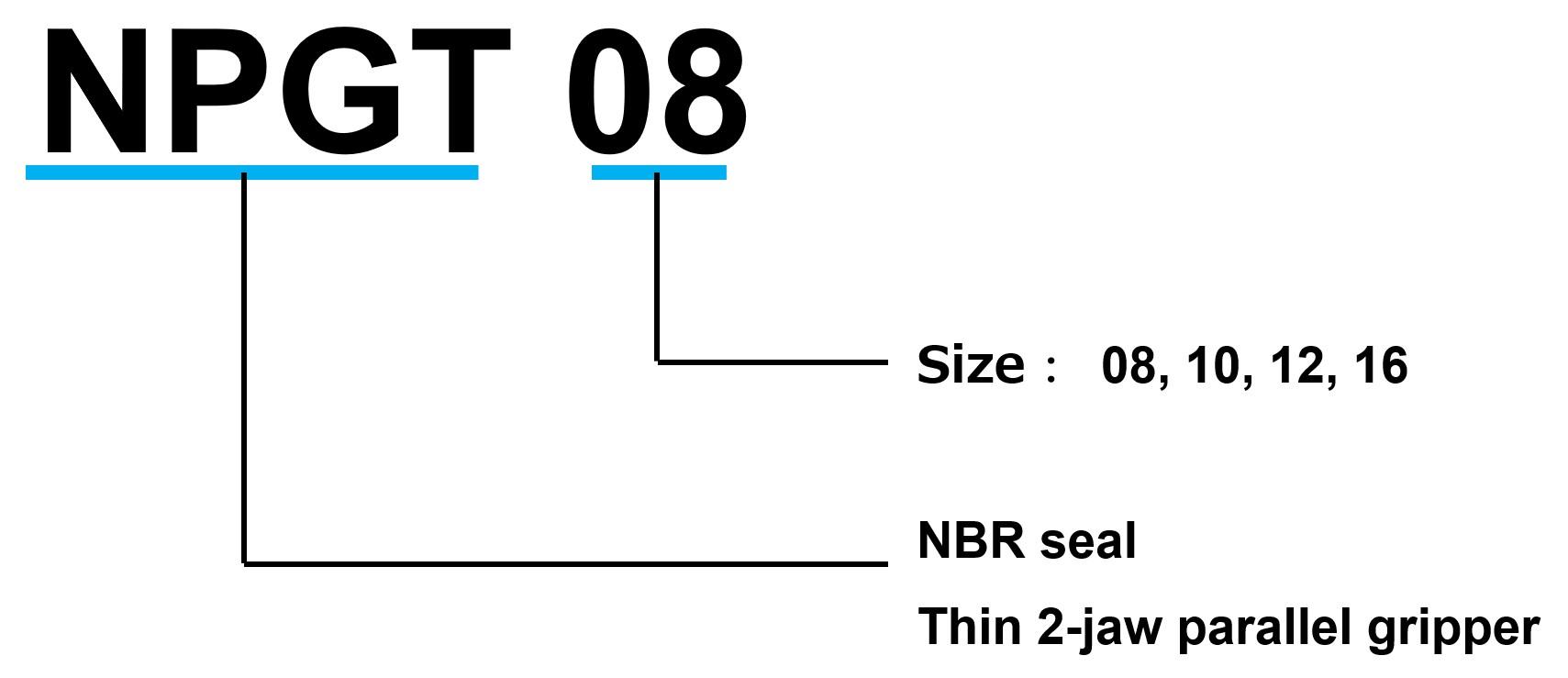
Robot hand
Please install a check valve in the air-pressure circuit so that the gripper will not release a workpiece even if the air pressure drops down.
When the jaw stroke is detected by the reed switches, mount reed switched on the grooves on the outer periphery of the product.
In case proximity switches are used for direct detection of jaw stroke, please purchase proximity switch brackets additionally.
| Model | (mm) |
(mm) |
(kg) |
(MPa) |
(℃) |
||||
|---|---|---|---|---|---|---|---|---|---|
(Note 1) L (mm) |
(N) |
(N) |
|||||||
| NPGT08 | 16.6 | 10 | 600 | 500 | ±0.008 | 0.79 | 34 | 0.2~0.8 | 5~60 |
| NPGT10 | 20.8 | 10 | 1000 | 860 | ±0.008 | 1.25 | 64 | 0.2~0.8 | 5~60 |
| NPGT12 | 26.4 | 10 | 2000 | 1700 | ±0.008 | 2.45 | 152 | 0.2~0.8 | 5~60 |
| NPGT16 | 32.6 | 10 | 2800 | 2650 | ±0.008 | 4.60 | 524 | 0.2~0.8 | 5~60 |
For more information on the allowable load of each gripper, please see the following link.
Click the model number and the gripping force diagram will be displayed. The gripping force, F is a product of the actual gripping force per jaw, F1 and the number of jaws
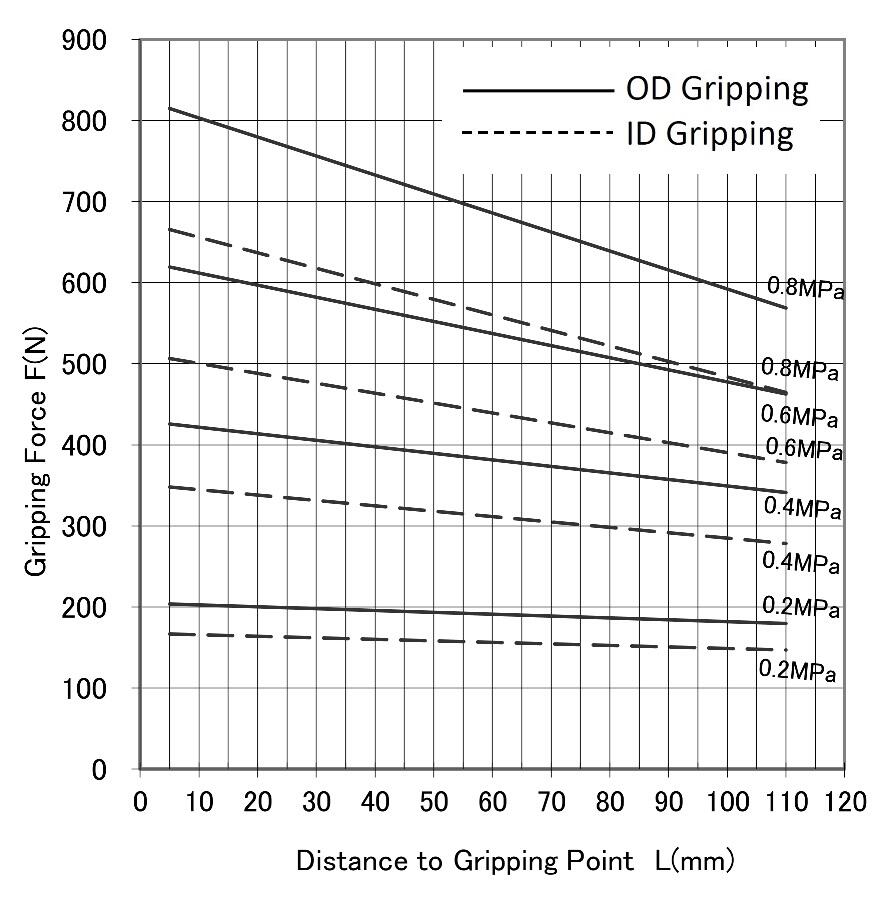
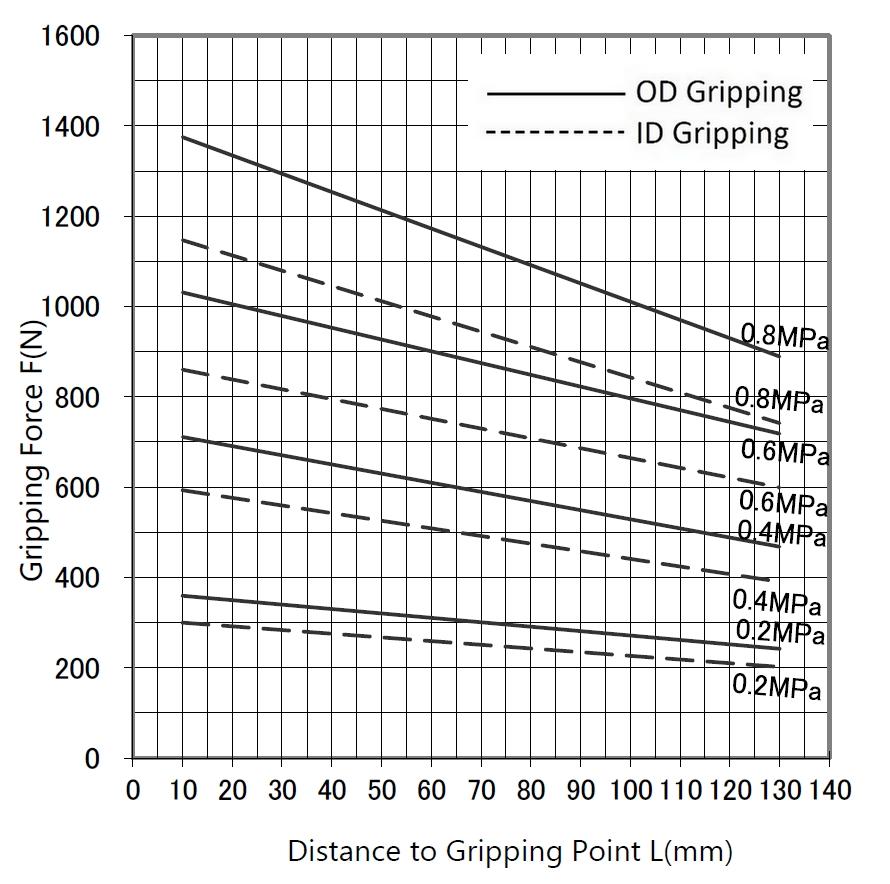
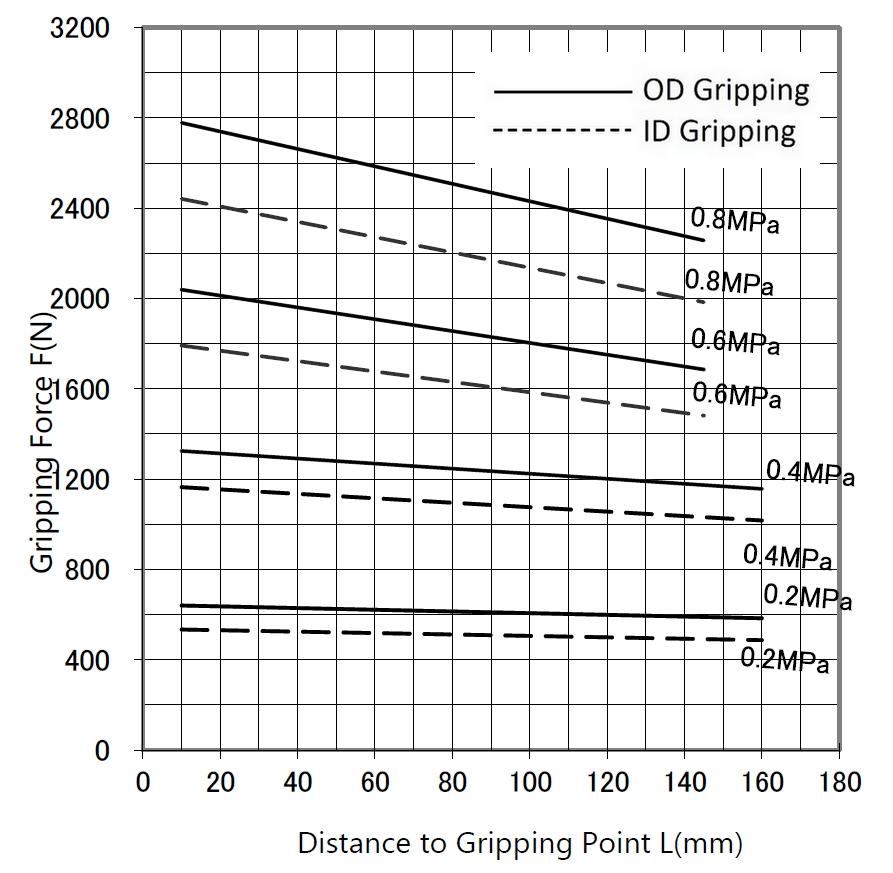
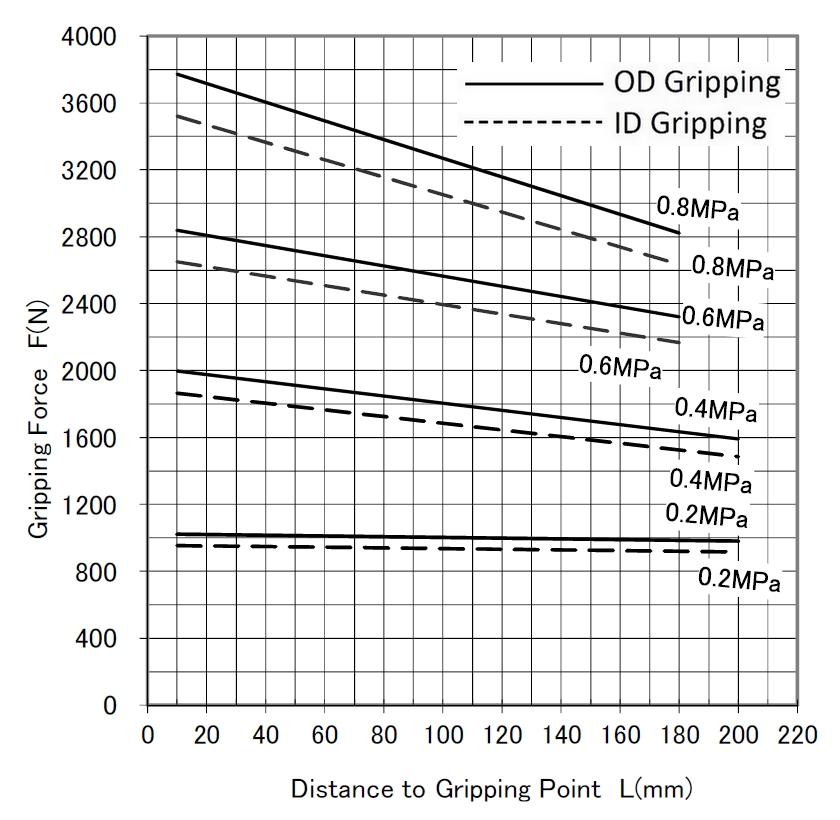
The gripping force will be calculated by the gripper model, air pressure, and other gripping conditions.
Calculate gripping force



Wide variety of world’s standard power chuck

High gripping force & stability to suit various requirements

Standard Manual Chucks suit to a high-mixture of work pieces and low-volume production.


Necessary item for Quality control and Safety

High performance Rotary Cylinder is integral to for the operation of a power chuck and extracts the maximum capability of the chuck.
Compact & high accuracy Combination with chuck is available.

Tail stocks, tail spindles, rotary joints, rotary chucks, Dedicated controller and others

Toggle joint mechanism Long jaw stroke


Stationary power chuck with built-in cylinder

Kitagawa's original grippers with high-quality and high-durability
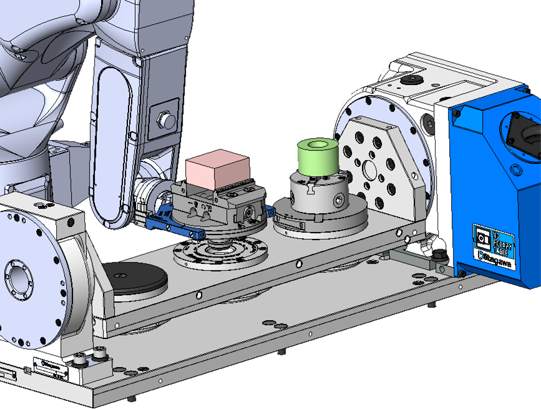
Strongly support factory automation and unmanned operation

Various catalogues can be downloaded.

Various flyers can be downloaded

Information on discontinued products is posted.