Machine Tool

*CE correspondence
| Model | RK201 | |
|---|---|---|
| Right-handed Type | ○ | |
| Left-handed Type | ○ | |
| Table Diameter (mm) | ø134 | |
| Centre Hole Diameter (mm) | ø80 +0.06/+0.02 | |
| Through Hole Diameter (mm) | ø70 | |
| Centre Height (mm) | 150 | |
| Clamping Method | Pneumatic | |
| Clamping Torque (N・m) (at 0.5MPa) | 340 | |
| Max. Instantaneous Holding Torque (N・m) | Note 1) (240) | |
| Max. continuous holding torque (N.m) | Note 1) (108) | |
| Motor Axis Reduced Inertia (kg・m2) | 0.000486 | |
| Servomotor (for Fanuc spec.) | Note 5) αiS8/4000 | |
| Total Reduction Ratio | 1/20 | |
| Max. Rotation Speed (min-1) | 4th axis spec. (Fanuc spec.) |
100 |
| M signal spec. | 100 | |
| Allowable Work Inertia (kg・m2) | 0.6 | |
| Indexing Accuracy (sec) | 20 | |
| Repeatability (sec) | 4 | |
| Mass of Product (kg) | 68 | |
| Allowable Load | Horizontal (kg) | 120 |
| Vertical (kg) | 60 | |
| Manual tail stock (Option) | TS160RN** | |
| Tail spindle (Option) | TSRC/MSRC160 | |
| Rotary Joint (Option) | RJ70Y20Z03 Hydraulic/Pneumatic 8 ports |
|
| Outline Drawing Kitagawa own controller spec. |
2D |  |
 |
||
 |
||
 |
||
| Outline Drawing 4th axis spec (Fanuc spec.) |
2D | |
|
||
|
||
|
||

Wide variety of world’s standard power chuck

High gripping force & stability to suit various requirements

Standard Manual Chucks suit to a high-mixture of work pieces and low-volume production.


Necessary item for Quality control and Safety

High performance Rotary Cylinder is integral to for the operation of a power chuck and extracts the maximum capability of the chuck.
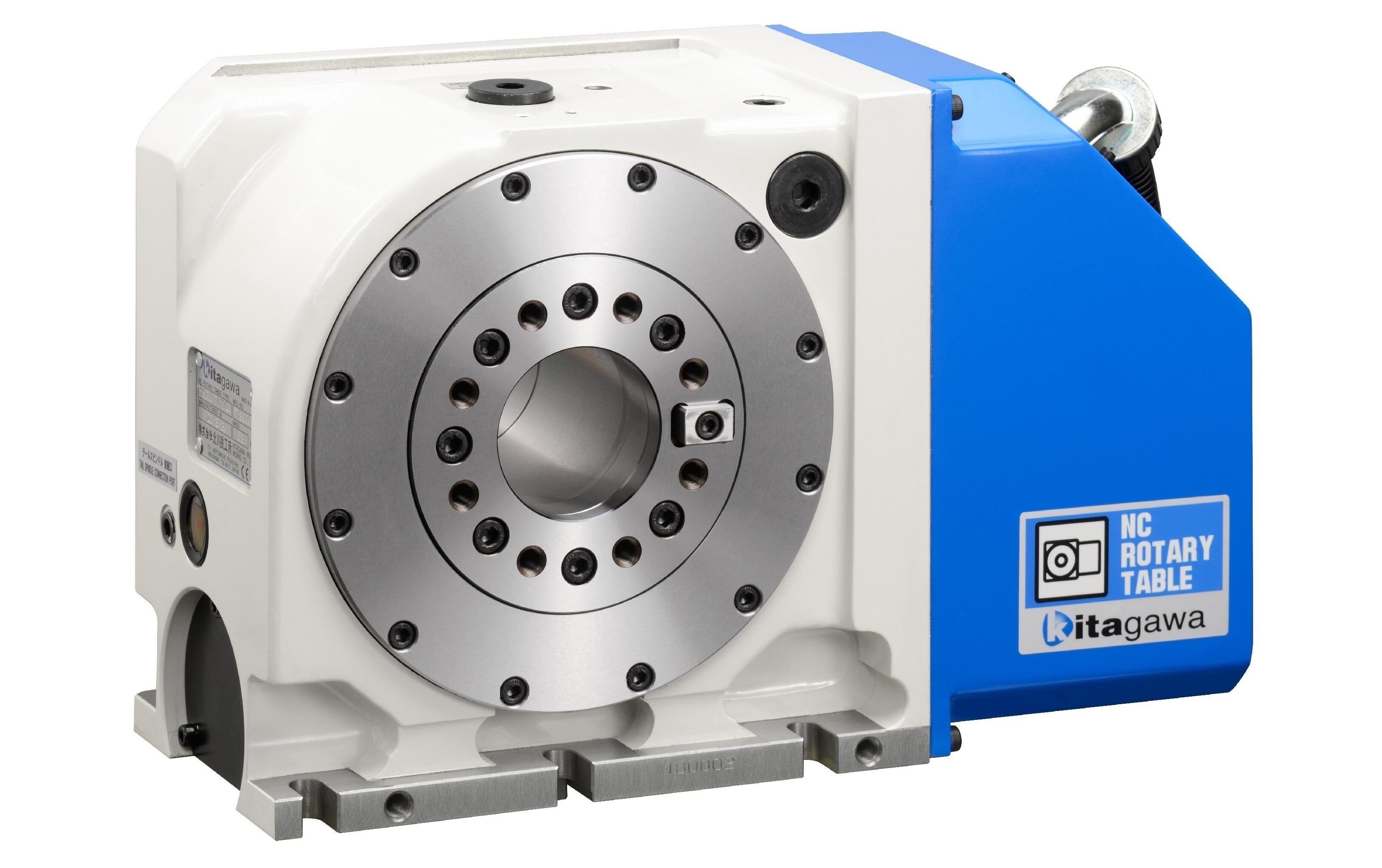
Compact & high accuracy Combination with chuck is available.

Tail stocks, tail spindles, rotary joints, rotary chucks, Dedicated controller and others

Toggle joint mechanism Long jaw stroke


Stationary power chuck with built-in cylinder

Kitagawa's original grippers with high-quality and high-durability
Strongly support factory automation and unmanned operation

Various catalogues can be downloaded.

Various flyers can be downloaded

Information on discontinued products is posted.